ロボティクスとカメラの共生関係において、変革をもたらす提携を通して、産業を再構築し、人間と機械の相互作用の範囲を再定義することができます。この相乗効果の核心となるものは、ロボティクスと高度なカメラ技術の融合であり、多様な用途にわたり様々な可能性を引き出す、ダイナミックなパートナーシップです。
カメラはロボットの目の役割を果たし、周囲の環境を詳細に認識および解釈する能力をロボットに付与します。製造工程の精度であれ、無人車両の自律性であれ、カメラを統合することにより、ロボットの能力は新たなレベルへと引き上げられ、さらなる進化を遂げます。最新鋭のセンサーと高いモジュール性を搭載した高解像度カメラを使用すると、ロボットに周囲の状況を理解させ、ナビゲーション、物体の操作、環境とのシームレスな連携を可能にさせます。
ロボティクスにはカメラ技術が不可欠であり、ロボットの認識、ナビゲーション、連携を向上させます。 ロボティクスに適切なビジョンシステムを検討する上で、以下のカメラ要件が重要となります。
ロボットとカメラをシームレスに統合するために必要な、GigE Vision規格とROS2に対応する既存のロボットシステム、ソフトウェア、その他のインターフェースとの互換性。
- 限られたスペース内やコンパクトなロボットプラットフォームへの設置に適合するよう、ビジョンシステムの小型設計の産業用カメラを優先化。
モーションによる画像のブレを防ぐグローバルシャッターセンサーおよび、リアルタイム処理に要求される高フレームレート・高解像度との最適なバランスを組合わせる事により、ビジョンタスクに要求される精密レベルの画像情報を取得できます。
人間や物体との衝突を回避できる、リアルタイム処理と低遅延性。
物体を正確に検出して撮影できる、高解像度・高画質な画像取得
ロボットに容易に装着できる、小型・軽量構造
長時間動作を可能にする、高いエネルギー効率性。
- 温度変化への堅牢性、耐衝撃性、耐振動性、防水性に優れたハウジング。




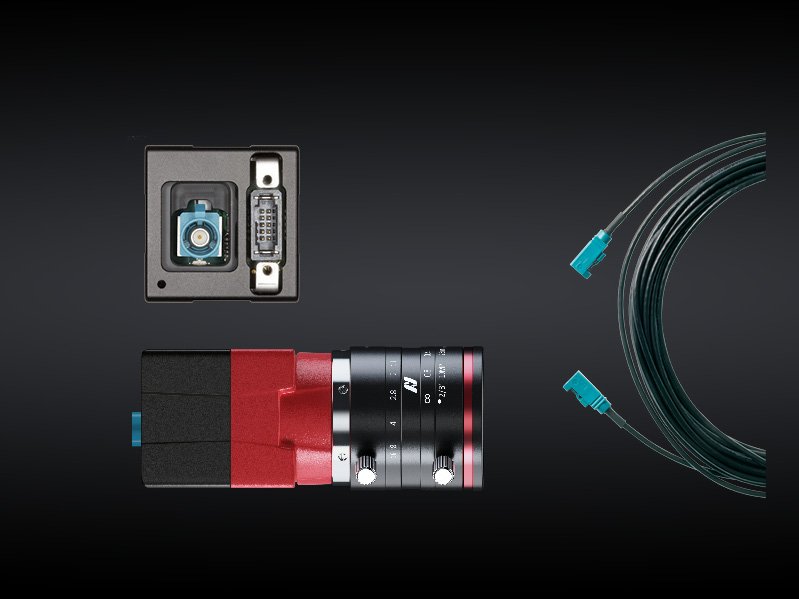
ロングケーブル・ソリューションを実現するAlviumカメラ
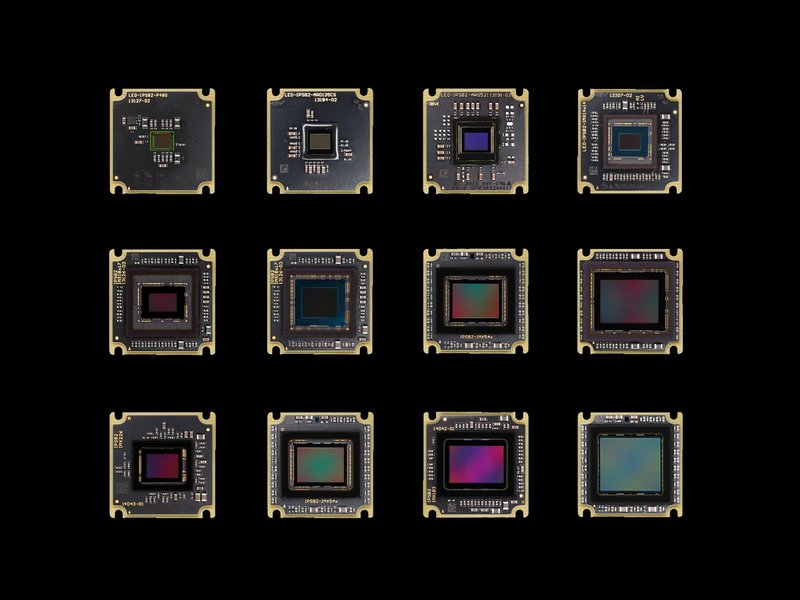
Alvium GM2カメラは、GMSL2規格インターフェースを、Alvium FP3カメラは、FPD-Link II規格インターフェースを搭載しています。両カメラは、標準的なMIPI CSI-2規格カメラの利点を持ちながら、更に機能拡張し、高性能に設計されています。アライドビジョンは、30種類以上もの高品質なCMOSグローバルシャッターセンサーおよびローリングシャッターセンサーを用意しております。そのため、業界最多水準の様々なGMSL2カメラおよびFPD-Link IIIカメラを提供しています。クローズドハウジング型のMIPI CSI-2規格ベースのカメラには、内蔵シリアライザ、光結合I/O(入力x1、 出力x1)を搭載しており、2点の高耐久性インターフェースコネクター(同軸またはSTP)から選択可能です。

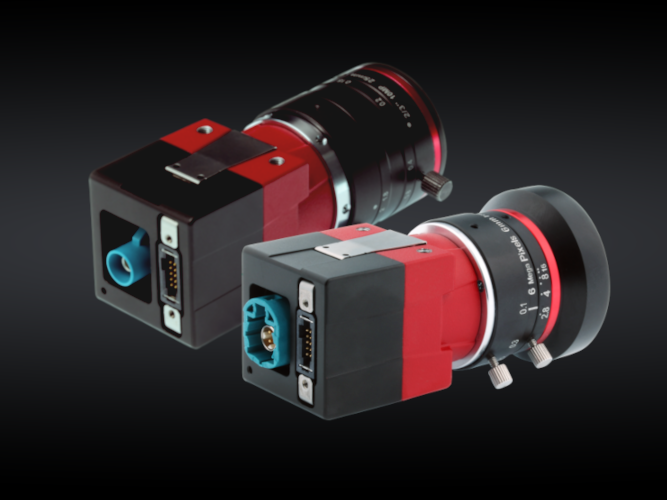
GigEおよび5GigE規格インターフェース搭載のAlviumカメラ
アライドビジョンでは、当社独自のASICチップであるALVIUM® Technologyを搭載した、2種類のGigEカメラを用意しています。業界最小水準のAlvium G1とAlvium G5は、業界内で確立されているGigE Vision規格とROS2対応(近日対応予定)の利点と、Alviumプラットフォームの柔軟性を兼ね備えています。 2種類の異なる帯域レベルを有するインターフェースから選択可能で、お客様の用途において新たな可能性が実現します。ソニー社製およびオン・セミコンダクター社製の最新グローバルシャッターセンサーやローリングシャッターセンサーをはじめ、25種類以上のセンサーから選択できます。UV(紫外)、可視、NIR(近赤外)、SWIR(短波赤外)などの幅広い波長範囲をカバーします。